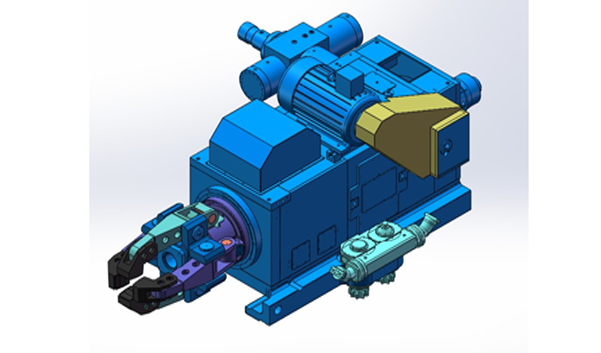
径向锻造操作机器人设有升降动作,夹持中心与数控快锻机中心始终保持同心,结构形式为箱体式结构,用来夹持,导向,前进和旋转工件,具有①夹钳夹紧、②车体行走、③夹钳旋转、④夹钳伸缩等4个动作。
操作机没有升降动作,夹持中心与数控快锻机中心始终保持同心,结构形式为箱体式结构,用来夹持,导向,前进和旋转工件,具有①夹钳夹紧、②车体行走、③夹钳旋转、④夹钳伸缩等4个动作。



 鲁公网安备 37020602000044号
鲁公网安备 37020602000044号